Navegação
Propriedades Mecânicas Dinâmicas
Em muitas aplicações, os artefactos de borracha são submetidos a deformações de natureza cíclica, de maior ou menor frequência. Vimos que o carácter cíclico das deformações impede que se manifeste o efeito de Gough-Joule. Outras alterações nas propriedades mecânicas conferem comportamentos diferentes às borrachas, como se verá de seguida.
Em geral, as propriedades mecânicas dinâmicas dos elastómeros são altamente dependentes da temperatura, da frequência e da amplitude da deformação. Todavia, a borracha natural apresenta um módulo dinâmico praticamente independente da temperatura – entre 0 e 50 ºC – e da frequência – abaixo de 1000 cps (ciclos por segundo ou Hertz – símbolo Hz). Na Figura 33 é mostrada a relação entre o módulo dinâmico e o módulo estático em função da frequência, para composições de diversos elastómeros de módulo estático equivalente. Nesta figura, módulo estático e módulo dinâmico estão representados pelos símbolos Kst e Kd, respectivamente.
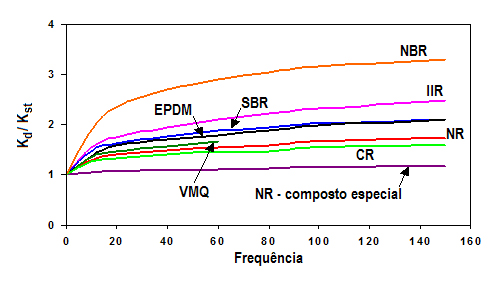 Fig. 33: Relação Kd/Kst em função da frequência
Fig. 33: Relação Kd/Kst em função da frequênciaVamos agora imaginar um bloco de borracha B, colocado entre duas superfícies rígidas A e C. Imaginemos ainda que na superfície A é aplicada uma força F de natureza sinusoidal, que vai provocar uma deformação de amplitude xo (veja-se a Figura 34).
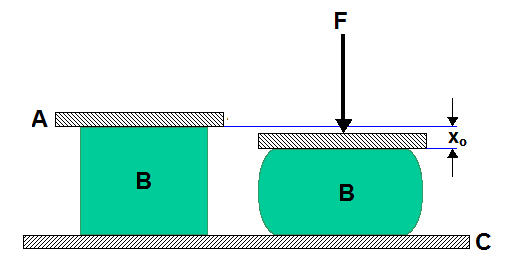 Fig. 34: Deformação de um bloco de borracha com uma força sinusoidal
Fig. 34: Deformação de um bloco de borracha com uma força sinusoidalVerifica-se que a resposta à solicitação não é simultânea, conforme se ilustra na Figura 35; este facto é devido a um fenómeno de viscoelasticidade.
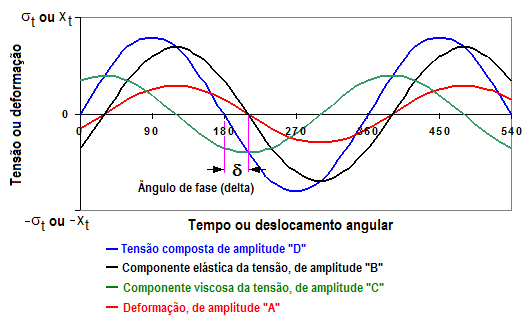 Fig. 35: Componentes da tensão e da deformação
Fig. 35: Componentes da tensão e da deformaçãoUma forma clássica de representar este comportamento elástico-viscoso dos elastómeros é com o chamado modelo de KELVIN – VOIGT, que se representa na Figura 36.
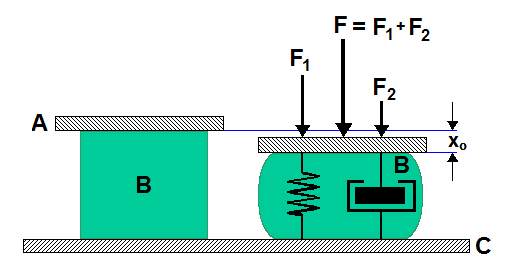 Fig. 36: Comportamento elástico-viscoso: Modelo de Kelvin-Voigt
Fig. 36: Comportamento elástico-viscoso: Modelo de Kelvin-VoigtEste modelo consiste:
a) na representação de uma mola, como símbolo da deformação elástica pura, para a qual:
![]()
K é a chamada constante da mola.
b) na representação de um pistão com êmbolo, como símbolo de uma deformação elástica-viscosa, para a qual:

R é a chamada resistência viscosa.
Obviamente que:

Como dissemos, F tem um carácter sinusoidal:

onde :
xo – é a amplitude da deformação;
ω – é a pulsação ou velocidade angular;
t – é o tempo;
x – é a deformação no tempo t.
Podemos então escrever:
![]()
que é a componente elástica, e:

que é a componente viscosa. F1 e F2 podem ser representadas por dois vectores, de módulos K.xo e R.ω.xo, respectivamente, vectores que fazem entre si um ângulo de 90º (veja-se Figura 37). A força total, F = F1 + F2, tem por módulo:
![]()
A força F varia com o tempo, segundo uma equação da forma:

 Fig. 37: Representação vectorial das componentes elástica e viscosa
Fig. 37: Representação vectorial das componentes elástica e viscosaem que δ é o chamado ângulo de perda e tan δ é o chamado factor de perda. Da Figura 37 pode concluir-se que:

Como se pode observar na Figura 35, a componente elástica encontra-se em fase com a deformação. A componente viscosa encontra-se com um avanço de 90º em relação à deformação e à componente elástica.
Se a força aplicada for do tipo tangencial, obtém-se uma deformação por corte xs, tal que:

e:

e:
![]()
sendo:
![]()
Sendo também:

Podemos considerar tensões, em vez de forças:

em que “e” é a altura ou espessura. A expressão (54) mostra que o módulo E é função do tempo e pode decompor-se nas suas componentes elástica E’ e viscosa E”; o módulo E é o chamado módulo composto:
![]()
e também:

Se a tensão aplicada for do tipo tangencial, teremos, de forma análoga:
![]()
E também:

Da Figura 35 podemos tirar as seguintes relações:

Módulo composto ou módulo dinâmico, E ou G:

Factor de perda:

Vamos fazer agora a representação de uma força de natureza sinusoidal em função das deformações produzidas. Para isso, consideremos novamente as componentes elástica e viscosa da força:
![]()
e:

Vimos também que:

Donde:

Como:
![]()
Podemos então escrever:

e:
![]()
Quadrando:
![]()
![]()
A representação de F(t) em função de x, relativa à expressão (65), corresponde ao lugar geométrico de uma elipse S’, tangente às duas rectas paralelas ao eixo das forças, passando por x + xo e por x – xo e que intercepta a recta F1(t)= K.x (t) nos pontos P1 e P2 (veja-se a Figura 38).
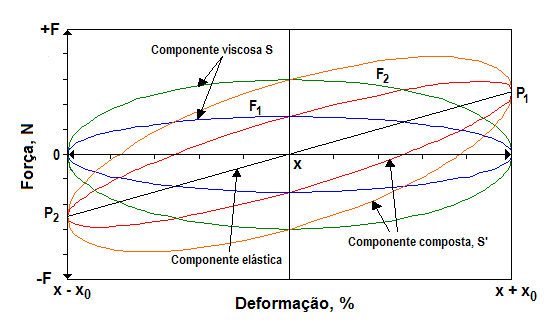 Fig. 38: Ciclo de deformações sinusoidais num sistema elástico viscoso
Fig. 38: Ciclo de deformações sinusoidais num sistema elástico viscosoComo:
![]()
e atendendo a (65) e (42), podemos escrever:

Que é também a equação de uma elipse, de semi-eixos xo e R.ω.Xo. Esta elipse S representa nada mais nada menos do que a variação da componente viscosa da força F em função de x. As áreas das elipses S e S’ são iguais e representam a energia que é absorvida em cada ciclo e que é:
![]()
É também chamada energia de histerése. Se a frequência da oscilação aumenta, como:
![]()
então obtemos uma família de elipses, sempre tangentes em P1 e P2, de áreas crescentes e proporcionais aos valores das pulsações ω1, ω2, …….ωn.
Para uma determinada borracha e para uma determinada frequência de vibração, quanto maior for a área da elipse, maior é a quantidade de energia dissipada, a qual é transformada em calor, o que pode levar o artefacto a atingir temperaturas muito elevadas, que podem conduzir à sua destruição.
Chama-se percentagem de amortecimento àrelação:

em que U1 corresponde à energia despendida na deformação (área delimitada pela linha vermelha) e U2 corresponde à energia elástica restituída pelo sistema (área em cor azul claro) (veja-se Figura 39). A área da elipse corresponde a U1 – U2 (área em cor rosa). A potência absorvida total é igual ao número de ciclos (frequência) vezes a energia absorvida em cada ciclo:

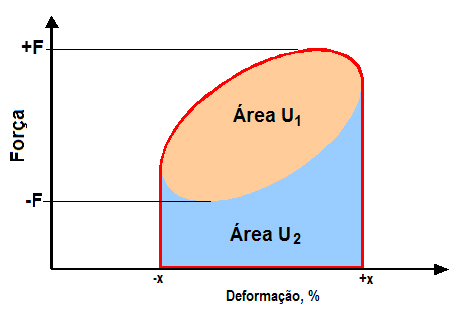 Fig. 39: Energia de histerése
Fig. 39: Energia de histeréseA experiência revela que, diferentes provetas de uma mesma composição de borracha, submetidos a deformações alternadas de amplitude xo, e com frequências variáveis ω, apresentam energias por ciclo constantes, isto é:
![]()
Como xo e л são também constantes, resulta que o produto:
![]()
Este produto é a chamada viscânciada borracha. A representação de R em função de ω, corresponde a uma hipérbole. Como:
![]()
isto quer dizer que, para uma mesma borracha, tan δ é também constante e esse valor será característico para uma determinada composição de borracha.
O amortecimento ou atrito interno da borracha origina resistência à deformação, que é proporcional à velocidade da deformação. A constante de proporcionalidade entre a resistência viscosa e a velocidade é também chamada constante de amortecimento, α:

Por outro lado, a resistência viscosa, diminui com o aumento da frequência. Se o atrito interno tomar valores tão elevados que não é possível atingir condições de equilíbrio, o movimento vibratório torna-se impossível e o amortecimento toma, nestas condições, a designação de amortecimento crítico.
Ao cociente entre a constante de amortecimento actual α e a constante de amortecimento crítico αc, chama-se relação de amortecimento, Є:

A relação entre fn (frequência natural) e Є é:

A relação (75) mostra que, para valores de Є = 0.3, há uma redução de cerca 5% na frequência natural, isto é, f ≈ 0,95 . fn, razão pela qual é vulgar desprezar o efeito da frequência.
A Tabela 20 mostra as relações de amortecimento para algumas composições de borracha.
| Tabela 20: Relação de amortecimento para alguns tipos de compostos de borracha | ||||
|---|---|---|---|---|
| Classe | Histerése | Tipo de composto | Є | N* |
| I | Baixa | NR com baixo nível de carga ou sem carga, tipo “goma pura” | 0,0375-0,0750 | 10-15 |
| II | Média | NR com cargas CR e SBR com baixo nível de cargas | 0,07-0,14 | 5-2,5 |
| III | Alta | NR com alto nível de cargas SBR com nível médio de cargas NBR | 0,09-0,18 | 2-4 |
| IV | Muito alta | IIR | 0,14-0,24 | 1,5-2,5 |
| * N é o número de oscilações livres até ser atingido um valor de 99% de amortecimento | ||||
Recomendações
Compostos da classe I: utilizar quando as exigências de amortecimento são relativamente baixas. Exemplo, crivos com vibradores).
Compostos da classe II: utilizar quando é exigido um nível médio de amortecimento. Exemplo: suspensões de comboios.
Compostos da classe III: utilizar nos casos em que há uma elevada exigência de amortecimento. Exemplo: suspensões de veículos automóveis.
Compostos da classe IV: utilizar nos casos em que as exigências de amortecimento são muito elevadas. Exemplo: suspensões para veículos todo-terreno.
